Lie Group
Lie Group 李群
同时具有群结构和流形结构的数学对象
- 群结构:可以进行“乘法”(群运算)和“逆运算”,符合群的四个基本公理。
- 流形结构:是一个连续可微的空间,可以进行微积分运算。
Lie群是一种可以平滑变化的连续群,群元素之间不仅可以做代数运算,而且可以连续移动、微分、优化。
数学定义
一个集合
-
是一个群,群运算 和取逆运算 满足: - 封闭性:对于所有
,有 。 - 结合性:对于所有
,有 。 - 单位元存在:存在元素
,使得对于所有 ,有 。 - 逆元存在:对于所有
,存在 ,使得 。
- 封闭性:对于所有
-
是一个光滑流形,且群运算和取逆运算是光滑(可微)映射:
常见 Lie Group
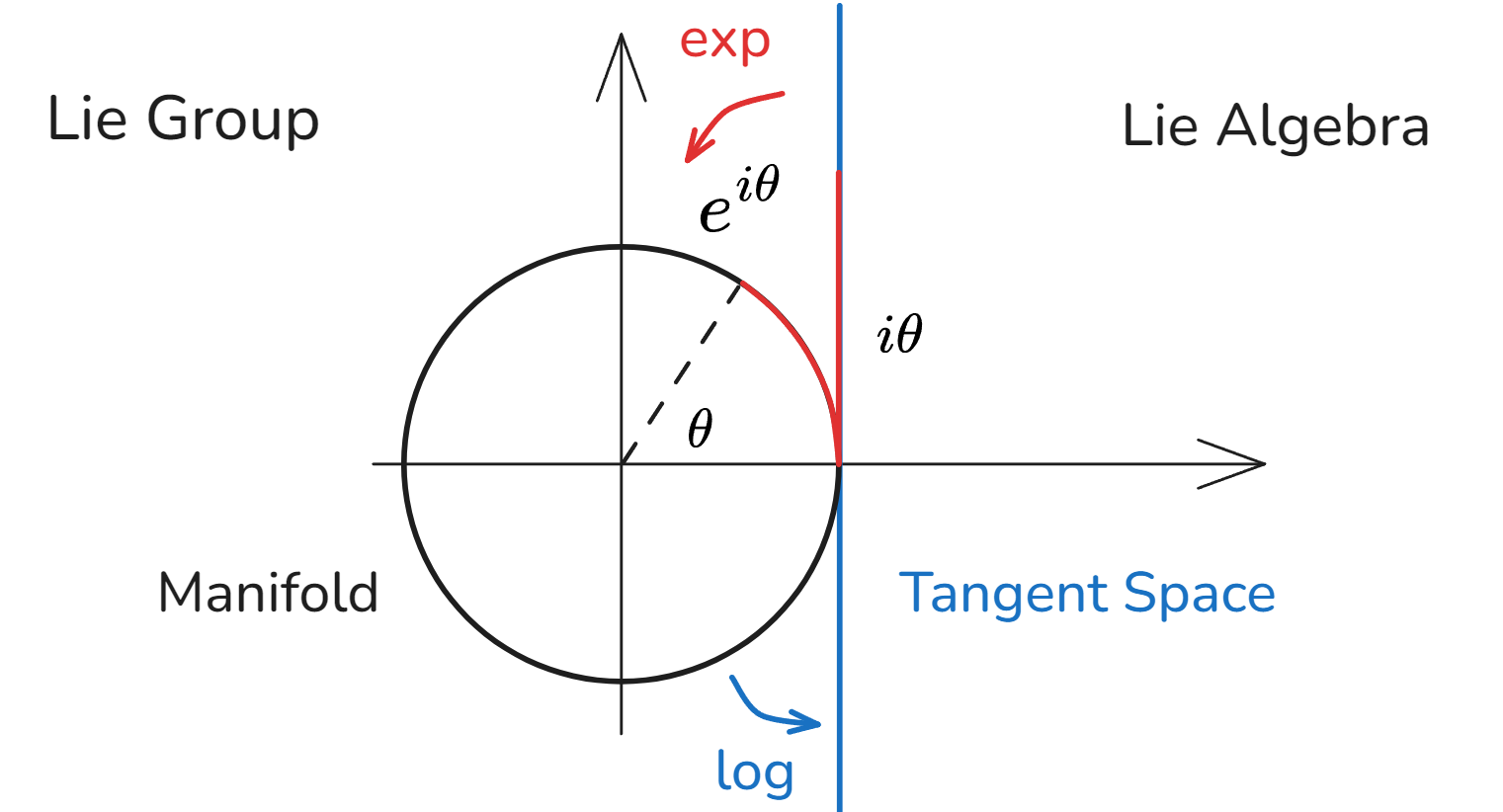
Lie群的微分结构由其李代数(Lie Algebra)描述。
Lie Group 描述全局运动(非线性),Lie Algebra 描述局部运动(线性)。
| Lie 群 | 群元素形式 | Lie 代数 | 解释 | 在机器人中的应用 |
|---|---|---|---|---|
| 二维平面旋转群 | 平面机器人、移动机器人姿态 | |||
| 三维空间旋转群 | 三维姿态,机械臂关节、无人机 | |||
| 平面刚体运动群(位置+角度) | 移动机器人位姿 | |||
| 空间刚体运动群(位置+姿态) | 机械臂末端运动、无人机运动 | |||
| 向量加法 | 向量本身 | 欧式空间,平移群 | 位置变化 |
核心运算
| 工具 | 作用 | 说明 |
|---|---|---|
| 指数映射(exp) | 李代数 → Lie群 | 用于从速度或微分量生成运动 |
| 对数映射(log) | Lie群 → 李代数 | 计算两个姿态之间的差异 |
| Hat运算(^) | 将向量转成反对称矩阵 | 常用于姿态误差建模 |
| Vee运算(∨) | 反对称矩阵转成向量 | 伴随Hat运算 |
| 伴随矩阵(Adjoint) | 坐标变换下李代数的映射 | 用于误差传播、变化率变换 |
实际应用
- 处理旋转和刚体运动(的最佳数学工具):避免欧拉角奇异性,比四元数更自然地支持导数和优化
- 误差建模:在SE(3)下可以合理定义姿态误差,而非简单的减法
- 运动规划与控制:运动路径可以在Lie群中连续变化,支持平滑插值,支持基于Lie群的运动优化算法,如 CHOMP、STOMP
- 多机器人协作:支持跨坐标系转换、误差传播
| 应用 | 说明 |
|---|---|
| 机械臂运动学 | 末端轨迹在SE(3)空间规划 |
| 位姿估计 | 视觉 SLAM、IMU 积分,利用SO(3)、SE(3)误差模型 |
| 轨迹学习 | PRIMP 等方法在SE(3)上建模轨迹概率分布 |
| 运动规划 | Workspace-STOMP等算法在Lie 群上定义代价函数 |
| 视觉变换 | 相机坐标系转换 |
连续对称性的语言
有限群适合描述离散对称,而李群则描述连续对称。例如旋转角度连续变化、刚体姿态连续变化、规范变换连续变化等问题,都天然属于李群框架。因此,李群可以看作群论从离散结构走向连续结构的自然延伸。
典型矩阵李群
最常见的李群几乎都来自矩阵群,例如:
这些群既有清晰的矩阵表示,又具备流形结构,因此构成李群理论最重要的入门样本。
数学意义
李群是群论、微分几何、表示论和数学物理的交汇点。它的核心作用在于:把"连续对称"这一观念变成可计算、可微分、可表示的数学结构。